Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
28 May 2017 | PR12, Paper, Machine Learning, CNN이번 논문은 Microsoft Research에서 2015년 NIPS에 발표한 “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks”입니다.
이 논문은 computer vision 분야의 중요한 문제 중의 하나인 object detection을 다룹니다.
이 논문은 Ross Girshick의 흔히 R-CNN이라고 하는 2013년 논문 “Rich feature hierarchies for accurate object detection and semantic segmentation”, 그리고 2015년 논문 “Fast R-CNN”에 이어지는 연구입니다.
Introduction
Object detection 계열의 논문에서 자주 나오는 용어에 대해 먼저 간단히 설명하겠습니다.
Selective Search

Uijlings의 논문에서 제안된 이 방법은, image에서 object의 candidate를 찾기 위한 알고리즘입니다. Color space 정보와 다양한 similarity measure를 활용해서 복잡한 segmentation 결과를 (위의 그림의 가장 왼쪽에서 오른쪽으로) grouping합니다. 뒤에서 설명할 R-CNN의 처음 단계에서 실행되는 알고리즘이기도 합니다.
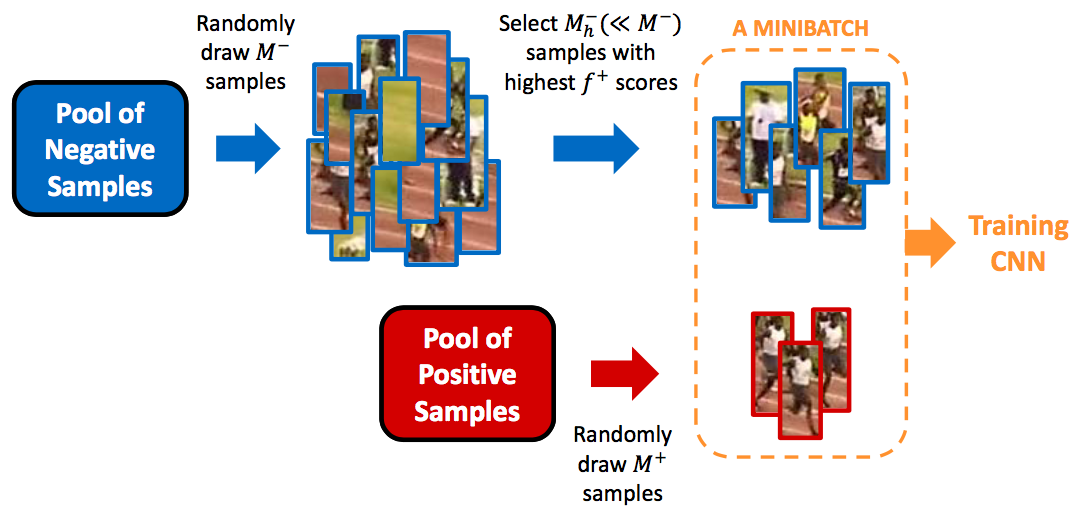
Hard Negative Mining
Hard Negative Mining은 positive example과 negative example을 균형적으로 학습하기 위한 방법입니다. 단순히 random하게 뽑은 것이 아니라 confidence score가 가장 높은 순으로 뽑은 negative example을 (random하게 뽑은 positive example과 함께) training set에 넣어 training합니다.
 (그림 출처: 한보형 님의 슬라이드 “Lecture 6: CNNs for Detection, Tracking, and Segmentation”)
(그림 출처: 한보형 님의 슬라이드 “Lecture 6: CNNs for Detection, Tracking, and Segmentation”)
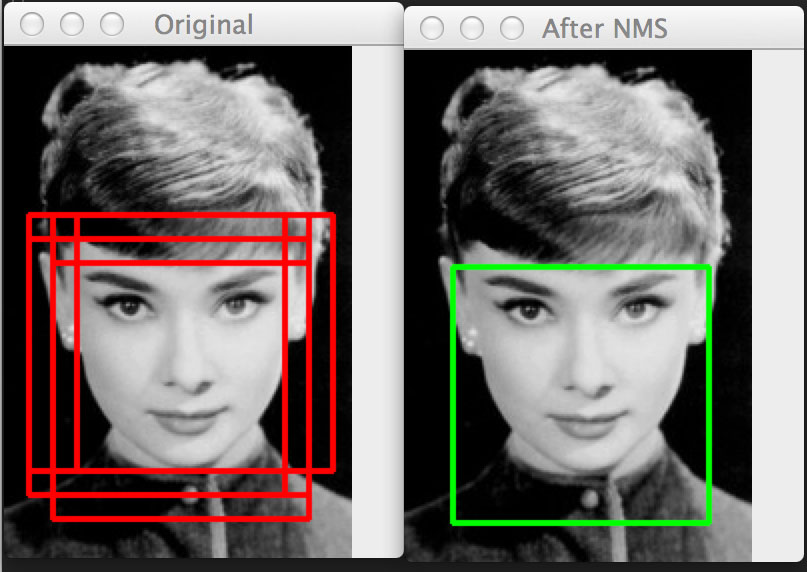
Non Maximum Suppression
Non Maximum Suppression은 edge thinning 기법으로, 여러 box가 겹치게 되면 가장 확실한 것만 고르는 방법입니다. 아래 그림을 보면 바로 이해할 수 있습니다.
 (그림 출처: PyImageSearch의 article “Histogram of Oriented Gradients and Object Detection”)
(그림 출처: PyImageSearch의 article “Histogram of Oriented Gradients and Object Detection”)
Bounding Box Regression
Bound box의 parameter를 찾는 regression을 의미합니다. 초기의 region proposal이 CNN이 예측한 결과와 맞지 않을 수 있기 때문입니다. Bounding box regressor는 CNN의 마지막 pooling layer에서 얻은 feature 정보를 사용해 region proposal의 regression을 계산합니다. 뒤에서 소개할 R-CNN에서 bounding box regressor가 등장합니다.
2-stage Detection
지금부터 설명드릴 R-CNN 계열의 연구는 모두 2-stage detection에 속합니다.
R-CNN
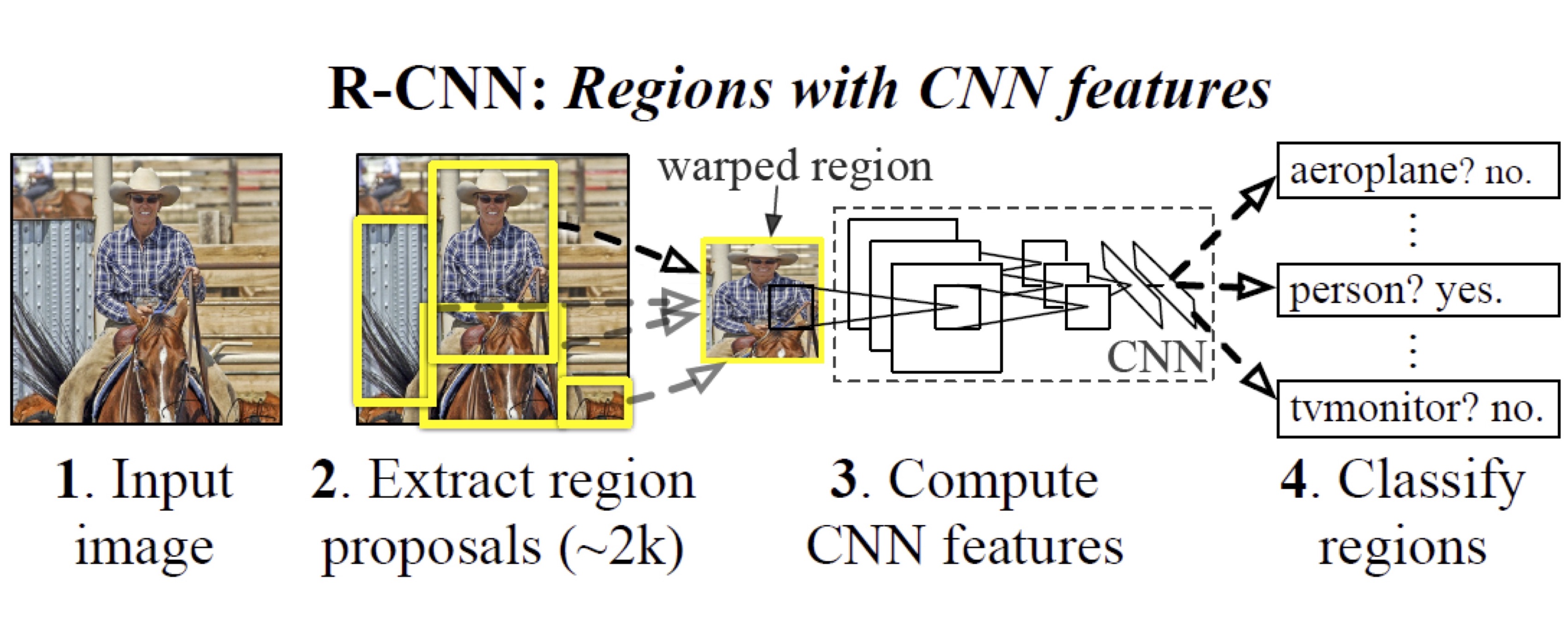
R-CNN은 CNN을 object detection에 적용한 첫 번째 연구입니다. 위의 그림이 R-CNN 개념을 설명하는 가장 유명한 그림입니다. 그림을 차례로 살펴 보면, (1) input image를 받아서 (2) selective search로 2000개의 region proposal을 추출한 다음, (3) CNN으로 각 proposal의 feature를 계산하고 (4) 각 region의 classification 결과와 bounding box regression을 계산합니다. Classifier로는 SVM을 사용합니다.
R-CNN의 특징은 다음과 같습니다.
- Regional Proposal + CNN
- Regional proposal을 얻기 위해 selective search 사용
- CNN을 사용한 첫 번째 object detection method
- 각 proposal을 독립적으로 계산 (= 많은 계산 필요)
- Bounding box regression으로 detection 정확도 향상
R-CNN의 전체 구조를 다른 그림으로 살펴 보면 아래와 같습니다.
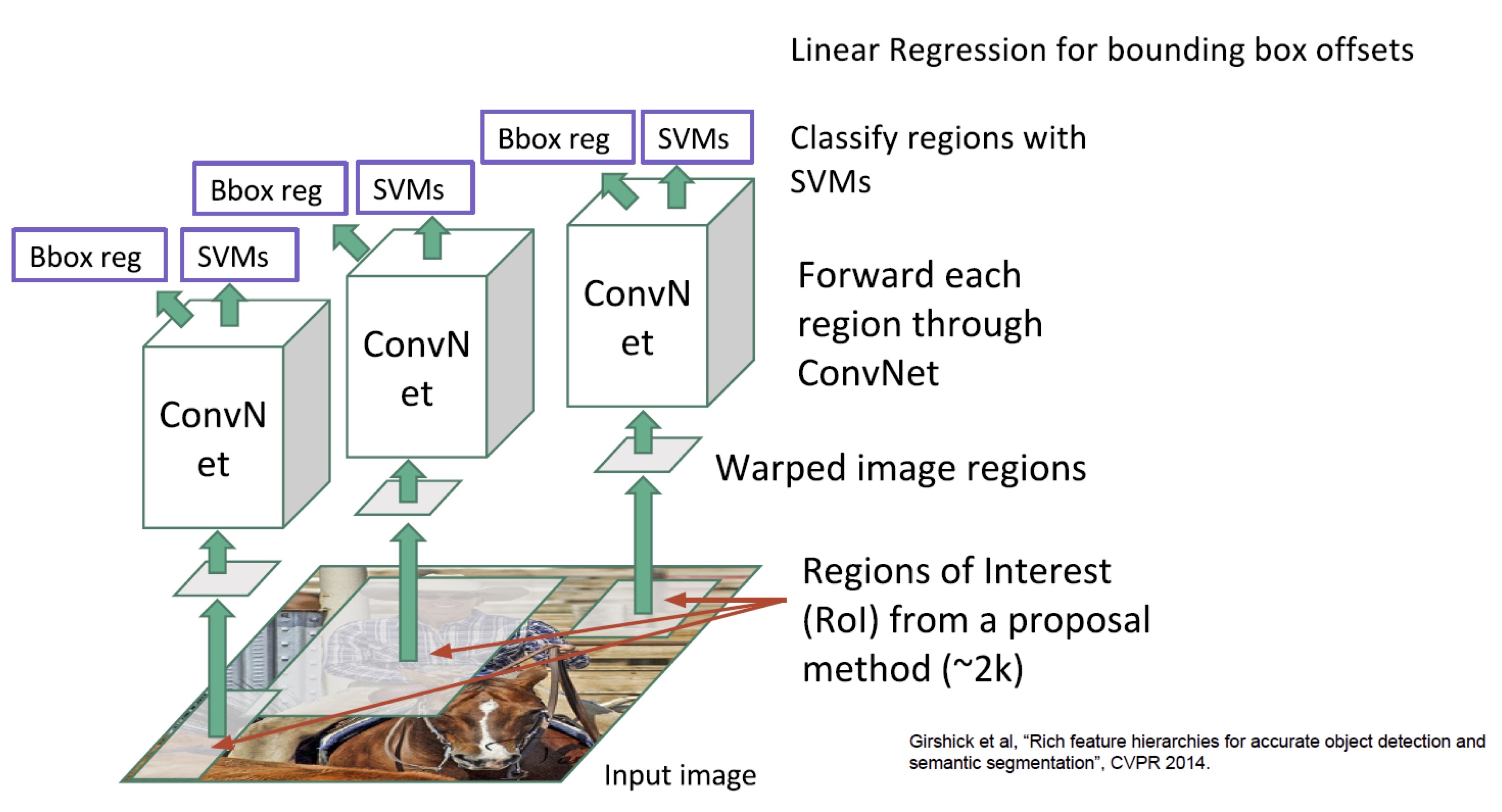
R-CNN은 몇 가지 문제를 가지고 있습니다.
- Test 속도가 느림
- 모든 region proposal에 대해 전체 CNN path를 다시 계산
- GPU(K40)에서 장당 13초
- CPU에서 장당 53초
- SVM과 bounding box regressor의 학습이 분리
- Feature vector를 disk에 caching
- CNN 학습 과정 후, SVN과 bounding box regressor의 학습이 나중에 진행됨(post-hoc)
- 학습 과정이 복잡함: 다단계 training pipeline
- GPU(K40)에서 84시간
Fast R-CNN
Fast R-CNN은 다음과 같은 특징을 가집니다.
- 같은 image의 proposal들이 convolution layer를 공유
- ROI Pooling 도입
- 전체 network이 End-to-end로 한 번에 학습
- R-CNN보다 빠르고 더 정확한 결과
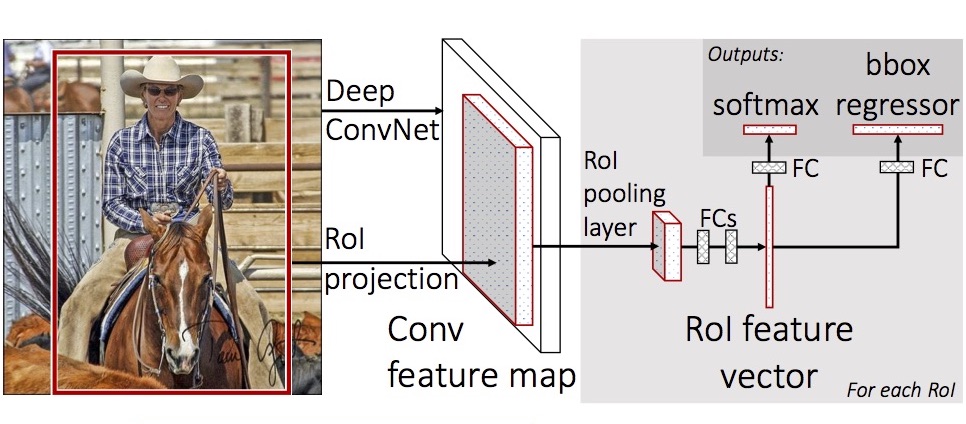
Fast R-CNN도 처음에 initial RoI (= region proposal)를 찾는 것은 selective search를 사용합니다. 하지만 각 RoI를 매번 convolution 하는 것이 아니라, 전체 image를 한 번만 convolution 합니다. 그 결과로 나온 convolution feature map에서 RoI에 해당하는 영역을 추출해 pooling (= subsampling) 과정을 거쳐 fully connected layer에 넣는 것이 Fast R-CNN의 핵심입니다. 아래 그림은 RoI pooling 과정을 설명하고 있습니다.
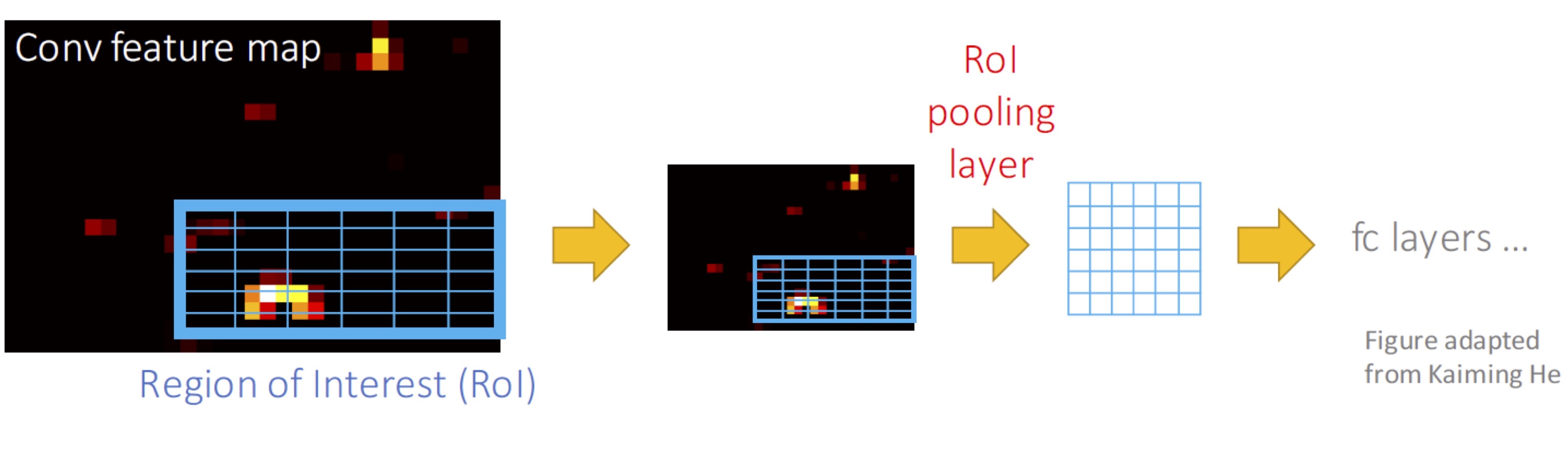 (그림 출처: 이진원 님의 발표 동영상)
(그림 출처: 이진원 님의 발표 동영상)
Fast R-CNN의 전체 구조를 다른 그림으로 살펴 보면 아래와 같습니다. 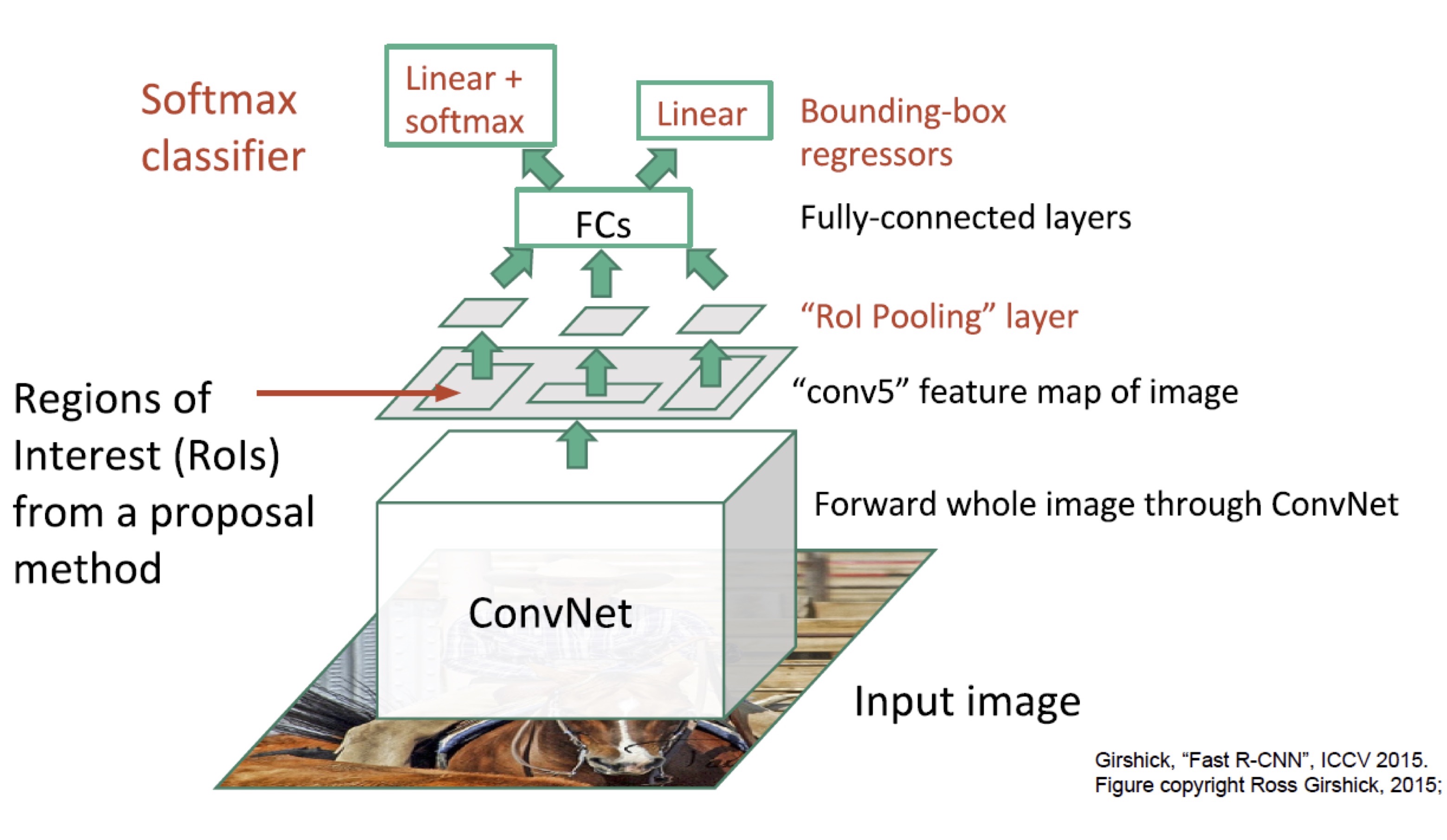
아래는 Fast R-CNN을 R-CNN과 다시 한번 비교한 그림입니다. 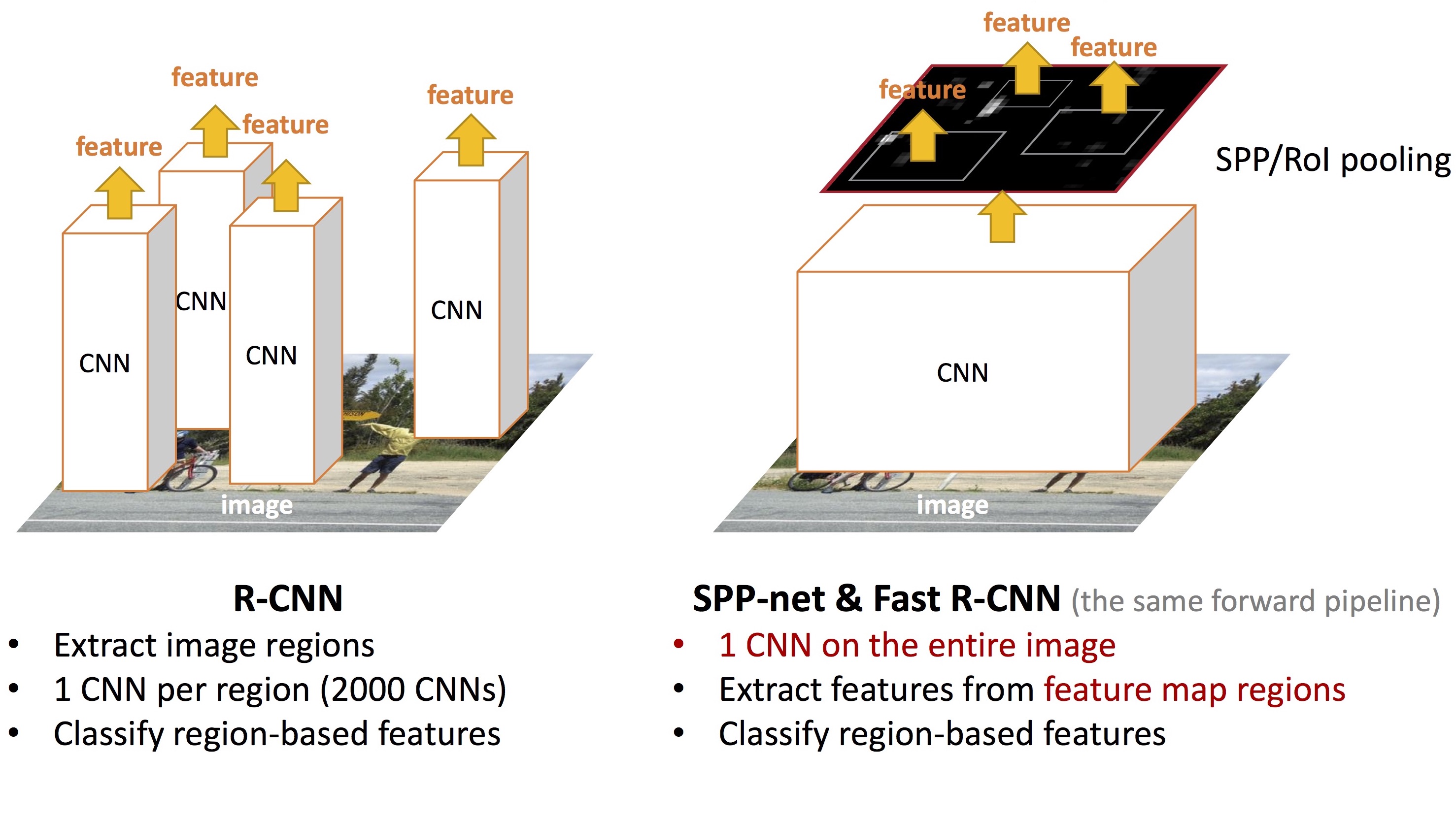 (그림 출처: Kaiming He의 ICCV 2015 Tutorial)
(그림 출처: Kaiming He의 ICCV 2015 Tutorial)
Fast R-CNN은 R-CNN에서 training이 복잡했던 문제를 해결했지만, 여전히 아래와 같은 문제를 가지고 있습니다.
- Region proposal 계산이 neural network 밖에서 일어난다.
- Region proposal 계산(selective search)이 전체 성능의 bottleneck이 된다.
Selective search가 느린 이유 중의 하나는 GPU가 아니라 CPU로 계산하기 때문입니다.
Faster R-CNN
지금부터가 오늘 소개 드리는 논문 “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks”의 내용입니다.
먼저, Faster R-CNN의 전체 구조는 아래 그림과 같습니다.
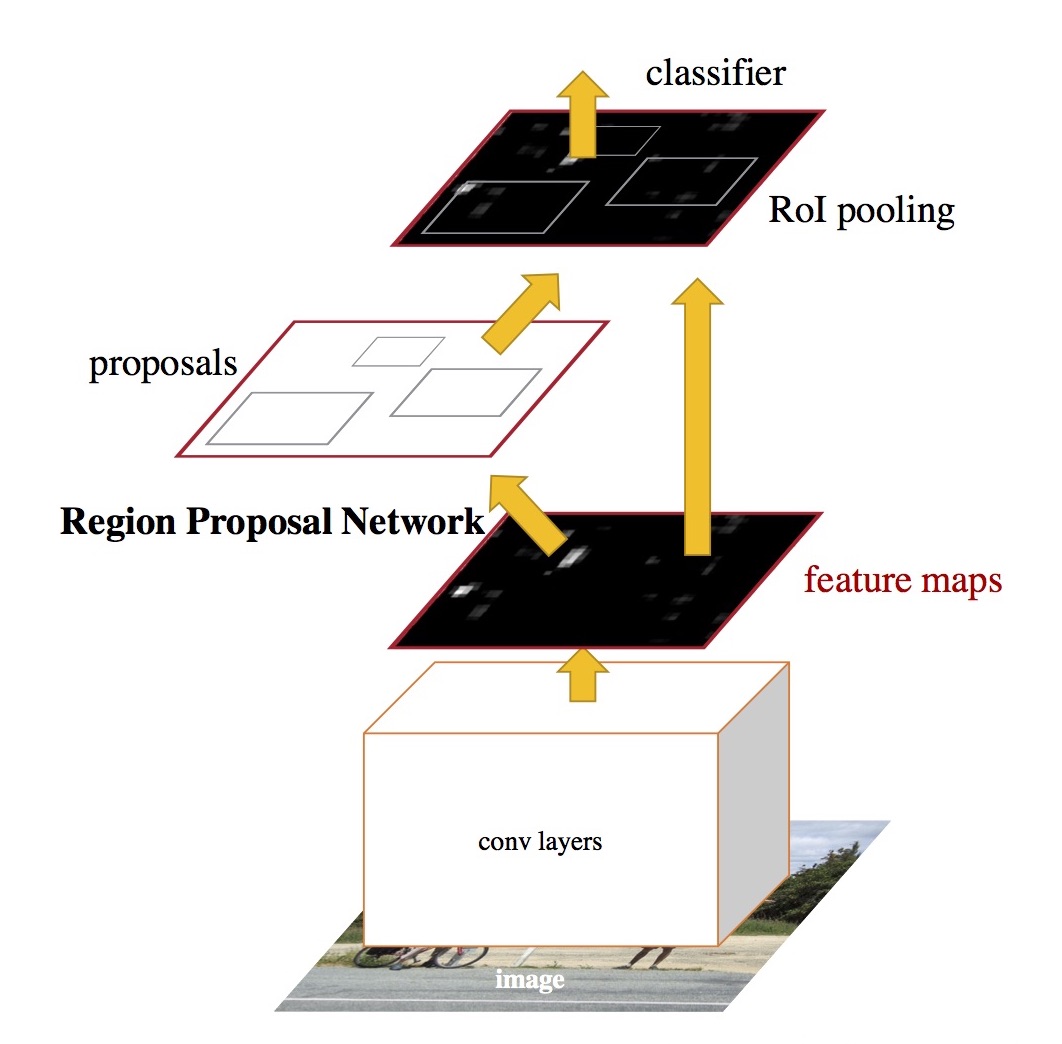
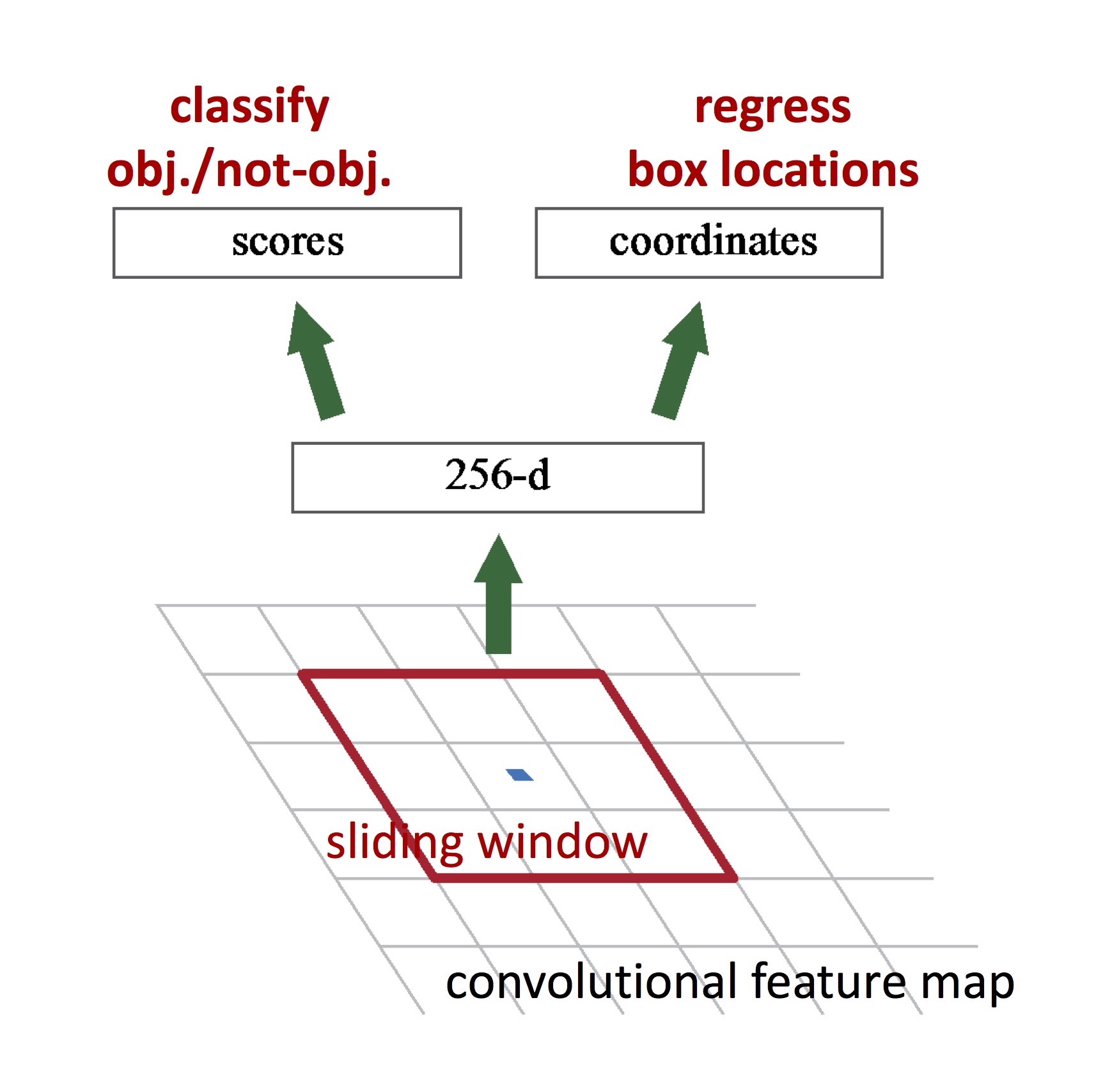
Faster R-CNN은 앞에서 설명한 Fast R-CNN을 개선하기 위해 Region Proposal Network (RPN)을 도입합니다. RPN은 region proposal을 만들기 위한 network입니다. 즉, Faster R-CNN에서는 외부의 느린 selective search (CPU로 계산) 대신, 내부의 빠른 RPN (GPU로 계산)을 사용합니다. RPN은 마지막 convolutional layer 다음에 위치하고, 그 뒤에 Fast R-CNN과 마찬가지로 RoI pooling과 classifier, bounding box regressor가 위치합니다. 아래 그림은 RPN의 구조를 보입니다.
 (그림 출처: Kaiming He의 ICCV 2015 Tutorial)
(그림 출처: Kaiming He의 ICCV 2015 Tutorial)
RPN은 sliding window에 $3 \times 3$ convolution을 적용해 input feature map을 256 (ZF) 또는 512 (VGG) 크기의 feature로 mapping합니다. 그 출력은 box classification layer (cls)와 box regression layer (reg)으로 들어갑니다. Box classification layer와 box regression layer는 각각 $1 \times 1$ convolution으로 구현됩니다.
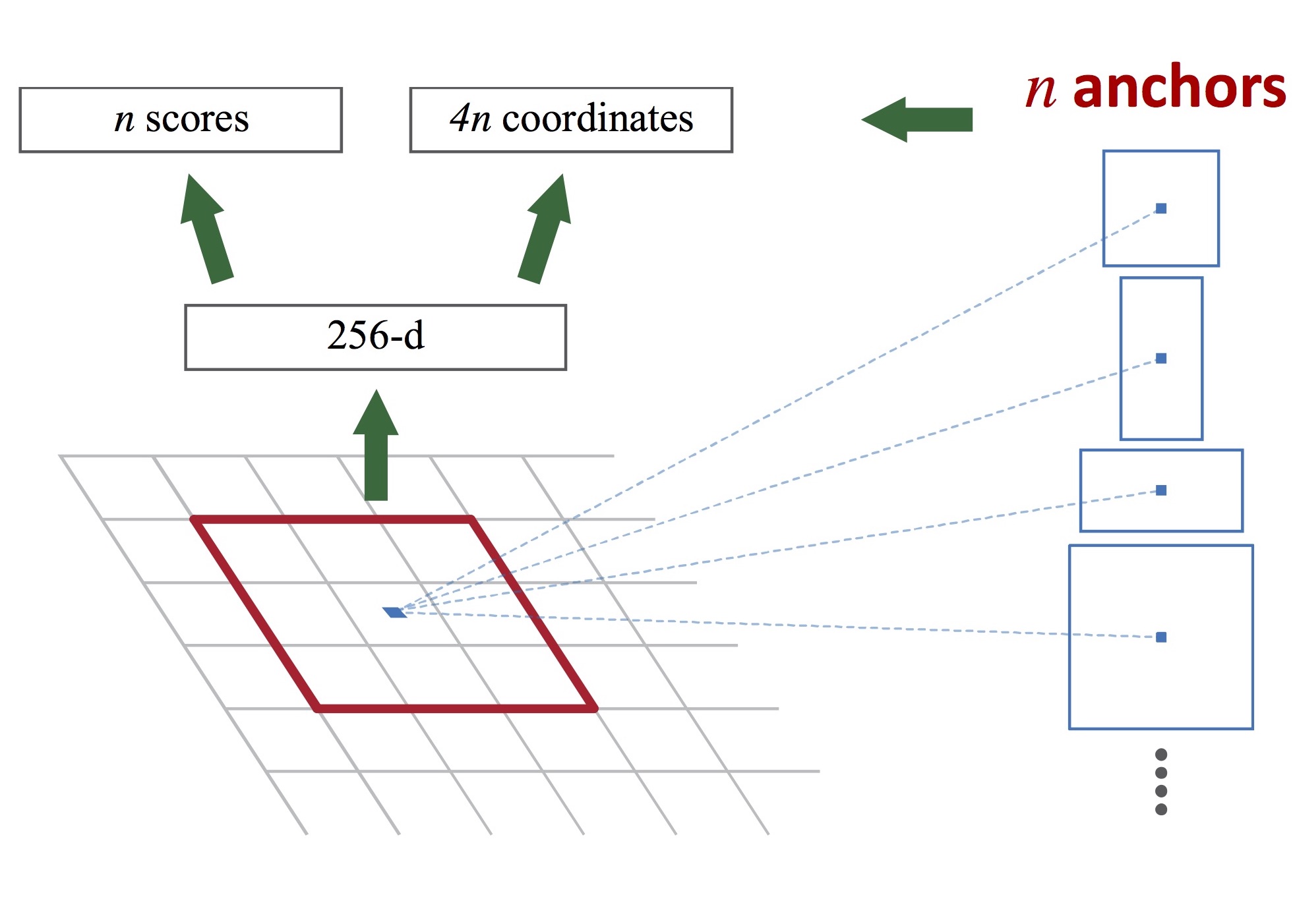
Box regression을 위한 초기 값으로 anchor라는 pre-defined reference box를 사용합니다. 이 논문에서는 3개의 크기와 3개의 aspect ratio를 가진 총 9개의 anchor를 각 sliding position마다 적용하고 있습니다. 아래 그림은 anchor의 개념을 보입니다.
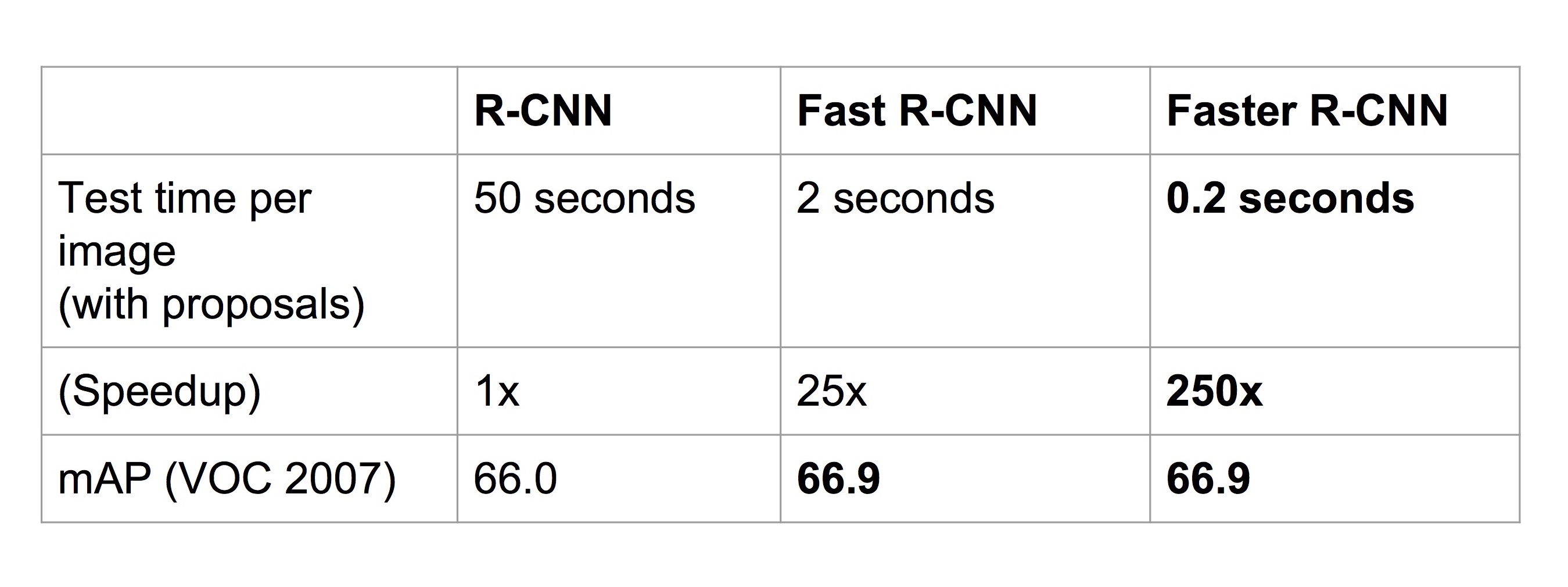
Faster R-CNN의 실험 결과입니다. PASCAL VOC 2007 test set을 사용한 실험에서 Faster R-CNN은 R-CNN의 250배, Fast R-CNN의 10배 속도를 내는 것을 볼 수 있습니다. Faster R-CNN은 약 5 fps의 처리가 가능하기 때문에 저자들은 near real-time이라고 주장합니다.
 (그림 출처: Stanford cs231n의 Lecture 8, “Spatial Localization and Detection”)
(그림 출처: Stanford cs231n의 Lecture 8, “Spatial Localization and Detection”)
Faster R-CNN의 특징을 정리하면 다음과 같습니다.
- RPN + Fast CNN
- Region proposal을 network 내부에서 계산
- RPN은 fully convolutional하다.
- RPN은 end-to-end로 train 된다.
- RPN은 detection network와 convolutional feature map을 공유한다.
그 밖의 최근 연구
지금까지 설명 드린 R-CNN 계열은 2-stage detection에 해당합니다. 2-stage detection 계열의 연구에서는, 이 밖에도 SPP-net, R-FCN, Mask R-CNN 등의 연구도 종종 인용됩니다.
한편, 2-stage detection 구조는 공통적으로 아래와 같은 단점을 가진다고 종종 지적 받습니다.
- 복잡한 pipeline
- 느리다. (real time 실행 불가능)
- 각 component를 optimize하기 어렵다.
이런 점을 극복하기 위해, 최근에는 unified detection에 해당하는 연구들이 등장하는 추세입니다. 대표적인 것으로는 Yolo, SSD (Single Shot multibox Detector)가 있습니다.
Yolo
- Detection 문제를 regression 문제로 접근
- 하나의 convolution network 사용
- 전체 image를 한 번에 처리하므로 매우 빠르다.
SSD
- Yolo보다 빠르고 Faster R-CNN 만큼 정확하다.
- Category와 box offset을 prediction한다.
- Feature map에 small convolutional filter 사용
- 여러 크기의 feature map을 사용해 prediction한다.
이 논문들에 대해서는 조만간 별도의 post로 설명 드리겠습니다. 그 밖에, Feature Pyramid Networks, ION 등의 연구도 주목받고 있습니다.
– Jamie;
References
- Shaoqing Ren의 논문 “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks”
- J.R.R. Uijlings의 논문 “Selective Search for Object Recognition”
- Ross Girshick의 논문 “Rich feature hierarchies for accurate object detection and semantic segmentation”
- Wikipedia의 Support Vector Machine
- Ross Girshick의 논문 “Fast R-CNN”
- Kaiming He의 ICCV 2015 Tutorial
- Shaoqing Ren의 GitHub “ShaoqingRen/faster_rcnn”
- Ross Girshick의 GitHub “rbgirshick/py-faster-rcnn”
- Ross Girshick의 GitHub “rbgirshick/fast-rcnn”
- Andy Tsai의 슬라이드 “Faster R-CNN: Towards Real-Time Object Detection”
- Xavier Giro의 슬라이드 “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks”
- Mathworks의 Documentation “Object Detection Using Faster R-CNN Deep Learning”
- 라온피플의 블로그 “머신 러닝(Machine Learning) - Class 47 : Best CNN(Convolutional Neural Network) Architecture - ResNet/Faster R-CNN(part5)”
- Liao Yuan-Hong의 블로그 “Video Object Detection using Faster R-CNN”
- Wikipedia의 Object detection
- Joseph Redmon의 논문 “You Only Look Once: Unified, Real-Time Object Detection”
- Wei Liu의 논문 “SSD: Single Shot MultiBox Detector”
- Jifeng Dai의 논문 “R-FCN: Object Detection via Region-based Fully Convolutional Networks”
- Tsung-Yi Lin의 논문 “Feature Pyramid Networks for Object Detection”
- Sean Bell의 논문 “Inside-Outside Net: Detecting Objects in Context with Skip Pooling and Recurrent Neural Networks”
- 한보형 님의 슬라이드 “Lecture 6: CNNs for Detection, Tracking, and Segmentation”
- PyImageSearch의 article “Histogram of Oriented Gradients and Object Detection”
- Stanford cs231n의 Lecture 8, “Spatial Localization and Detection”
- Kaiming He의 논문 “Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition”
- Kaiming He의 논문 “Mask R-CNN”